실시간 형태 제어 가능한 '접이식 로봇 시트' 기술 개발
2025년 08월 06일 오후 5:54
전자 종이처럼 사용자의 의도에 따라 다양한 형태로 접었다 펼 수 있는 '로봇 시트'가 개발됐습니다.
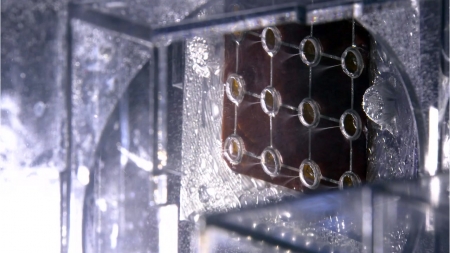
KAIST 기계공학과 김정·박인규 교수 연구팀은 얇고 유연한 고분자 기판에 미세 금속 저항 네트워크를 넣어 다양한 위치와 방향으로 접히는 형상 프로그래밍 로봇 소재를 만들었습니다.
이 기술은 사용자가 접히는 위치와 방향, 정도를 설정하면 저항 네트워크가 전류 분포를 조절해 고분자 필름의 국소 부위를 가열함으로써 곡률 변화를 일으키는 방식입니다.
특히, 시트 내부에 내장된 전자 회로가 열을 내고 온도를 감지하는 역할을 동시에 수행해 별도 장치 없이 접힘 상태를 감지하고 제어할 수 있습니다.
연구팀은 이 기술이 실시간으로 로봇의 형태 변화를 가능하게 해, 우주 탐사와 구조 활동 등 다양한 분야의 로봇 개발에 활용될 수 있을 것으로 기대했습니다.
YTN 사이언스 권석화 (stoneflower@ytn.co.kr)
KAIST 기계공학과 김정·박인규 교수 연구팀은 얇고 유연한 고분자 기판에 미세 금속 저항 네트워크를 넣어 다양한 위치와 방향으로 접히는 형상 프로그래밍 로봇 소재를 만들었습니다.
이 기술은 사용자가 접히는 위치와 방향, 정도를 설정하면 저항 네트워크가 전류 분포를 조절해 고분자 필름의 국소 부위를 가열함으로써 곡률 변화를 일으키는 방식입니다.
특히, 시트 내부에 내장된 전자 회로가 열을 내고 온도를 감지하는 역할을 동시에 수행해 별도 장치 없이 접힘 상태를 감지하고 제어할 수 있습니다.
연구팀은 이 기술이 실시간으로 로봇의 형태 변화를 가능하게 해, 우주 탐사와 구조 활동 등 다양한 분야의 로봇 개발에 활용될 수 있을 것으로 기대했습니다.
YTN 사이언스 권석화 (stoneflower@ytn.co.kr)
[저작권자(c) YTN science 무단전재, 재배포 및 AI 데이터 활용 금지]