다리·바퀴 번갈아…장애물·경사로도 거침없이
2025년 11월 11일 오전 09:00
[앵커]
울퉁불퉁한 자갈밭이나 계단, 가파른 경사로 같은 복합 지형은 바퀴형 로봇의 최대 약점이었죠.
이에 국내 연구진이 바퀴와 다리, 두 가지 주행 방식을 자유자재로 넘나드는 '폴더블 레그 로봇'을 개발했습니다.
권석화 기자입니다.
[기자]
가파른 경사면을 오르던 작은 로봇이 멈춰서더니, 몸체 아래 접혀 있던 다리가 펼쳐집니다.
순식간에 다리로 몸체를 들어 올린 로봇은 다시 다리를 접고 바퀴로 경사면을 부드럽게 내려옵니다.
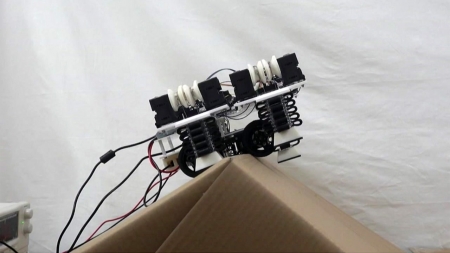
이 로봇은 기존 바퀴형 로봇에 접히고 구부러지는 보조 다리를 더한 '폴더블 레그 로봇'입니다.
장애물을 만나면 다리로 몸체를 들어 올리고, 평지에서는 바퀴의 움직임을 방해하지 않도록 다리를 접어 빠르고 안정적으로 주행합니다.
[유 승 훈 / 고려대 전기전자공학부 석박통합과정생 : "평평한 평면에서는 다리를 쉽게 접어 올려서 바퀴 구동으로 빠르게 극복을 하고, 또 장애물을 맞닥뜨리게 되면 다리가 순간적으로 단단해지면서 이제 차체를 들어 올려 이 지형을 극복해 내는 그런 기술을 이번에 개발했습니다."]
[기자]
이 다리는 3D 프린팅으로 만든 지지 구조 사이에 접힌 고무가 연골처럼 이어진 형태입니다.
고무의 탄성력 덕분에 로봇 전체를 들어 올릴 만큼 강한 힘을 낼 수 있습니다.
여기에 모터와 도르래를 이용해 다리가 위아래로 늘어나거나 한쪽으로 부드럽게 굽혀지는 '리니어 모션'을 구현했습니다.
모터 두 개가 다리 하나를 제어하는데 양쪽을 당기면 차체를 들어 올리고, 한쪽만 당기면 다리가 접히며 방향을 바꾸게 됩니다.
이 구조를 통해 로봇은 최대 73도의 급경사를 오를 수 있고, 자갈밭이나 장애물도 90% 이상의 성공률로 통과했습니다.
[차 영 수 / 고려대 전기전자공학부 교수 : 기존의 바퀴형 로봇에 비해서는 4개의 다리를 추가로 장착하면서도 소프트하고 가벼운 물질로 이루어져 있기 때문에 / 어느 정도 지지력을 가지기 위해서 접힌 고무에 연속체 구조를 만들어서 어느 정도 지지력을 확보하면서도 부드러운 모션이 가능하도록….]
[기자]
연구진은 앞으로 센서와 인공지능 제어 기능을 탑재해 산업 현장의 감시 로봇과 가정용 보조 로봇으로 발전시킬 계획입니다.
YTN 사이언스 권석화입니다.
YTN 사이언스 권석화 (stoneflower@ytn.co.kr)
울퉁불퉁한 자갈밭이나 계단, 가파른 경사로 같은 복합 지형은 바퀴형 로봇의 최대 약점이었죠.
이에 국내 연구진이 바퀴와 다리, 두 가지 주행 방식을 자유자재로 넘나드는 '폴더블 레그 로봇'을 개발했습니다.
권석화 기자입니다.
[기자]
가파른 경사면을 오르던 작은 로봇이 멈춰서더니, 몸체 아래 접혀 있던 다리가 펼쳐집니다.
순식간에 다리로 몸체를 들어 올린 로봇은 다시 다리를 접고 바퀴로 경사면을 부드럽게 내려옵니다.
이 로봇은 기존 바퀴형 로봇에 접히고 구부러지는 보조 다리를 더한 '폴더블 레그 로봇'입니다.
장애물을 만나면 다리로 몸체를 들어 올리고, 평지에서는 바퀴의 움직임을 방해하지 않도록 다리를 접어 빠르고 안정적으로 주행합니다.
[유 승 훈 / 고려대 전기전자공학부 석박통합과정생 : "평평한 평면에서는 다리를 쉽게 접어 올려서 바퀴 구동으로 빠르게 극복을 하고, 또 장애물을 맞닥뜨리게 되면 다리가 순간적으로 단단해지면서 이제 차체를 들어 올려 이 지형을 극복해 내는 그런 기술을 이번에 개발했습니다."]
[기자]
이 다리는 3D 프린팅으로 만든 지지 구조 사이에 접힌 고무가 연골처럼 이어진 형태입니다.
고무의 탄성력 덕분에 로봇 전체를 들어 올릴 만큼 강한 힘을 낼 수 있습니다.
여기에 모터와 도르래를 이용해 다리가 위아래로 늘어나거나 한쪽으로 부드럽게 굽혀지는 '리니어 모션'을 구현했습니다.
모터 두 개가 다리 하나를 제어하는데 양쪽을 당기면 차체를 들어 올리고, 한쪽만 당기면 다리가 접히며 방향을 바꾸게 됩니다.
이 구조를 통해 로봇은 최대 73도의 급경사를 오를 수 있고, 자갈밭이나 장애물도 90% 이상의 성공률로 통과했습니다.
[차 영 수 / 고려대 전기전자공학부 교수 : 기존의 바퀴형 로봇에 비해서는 4개의 다리를 추가로 장착하면서도 소프트하고 가벼운 물질로 이루어져 있기 때문에 / 어느 정도 지지력을 가지기 위해서 접힌 고무에 연속체 구조를 만들어서 어느 정도 지지력을 확보하면서도 부드러운 모션이 가능하도록….]
[기자]
연구진은 앞으로 센서와 인공지능 제어 기능을 탑재해 산업 현장의 감시 로봇과 가정용 보조 로봇으로 발전시킬 계획입니다.
YTN 사이언스 권석화입니다.
YTN 사이언스 권석화 (stoneflower@ytn.co.kr)
[저작권자(c) YTN science 무단전재, 재배포 및 AI 데이터 활용 금지]